回归技术本源,夯实创新基础。2025年,Nullmax以前沿研究、专利布局与工程实践为核心,在多项关键技术领域实现了单点爆破与系统性沉淀,持续构建并完善了一套可复用、可组合的通用技术体系。
通过将创新能力固化为可持续的技术资产,Nullmax 正以更高的效率与灵活性,支撑从 L2+ 到 L4 级智能驾驶的稳步演进。
专利布局:拓宽智权护城河
技术创新,专利先行。截至目前,Nullmax 已在智能驾驶关键领域累计获得多项发明专利授权,逐步构建起严密的技术保护网。
2025 年,公司知识产权布局取得重要进展:全年申请发明专利近二十项,均预审审核通过,陆续取得授权中,实现“向上探索”与“向下夯实”双线推进:向上延伸至端到端轨迹预测、拓扑推理等前沿领域,抢占新一代技术高地;向下持续优化量产产品的性能、体验,覆盖自动泊车、障碍物检测等多个关键技术环节。
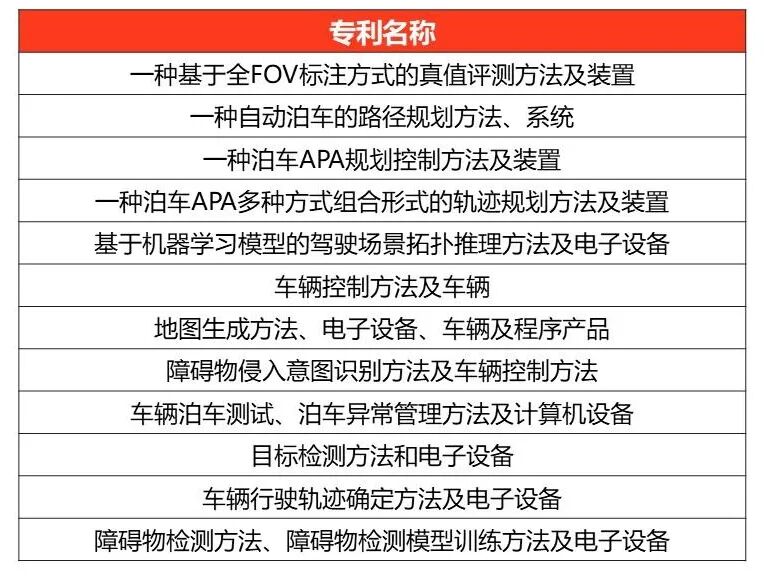
01专利《障碍物检测方法、障碍物检测模型训练方法及电子设备》
以智驾感知的核心任务——障碍物检测为例,Nullmax 专利《障碍物检测方法、障碍物检测模型训练方法及电子设备》,可实现多型号相机分组构建 BEV 特征,按视角交叠关系对相机分组,充分利用交叠区域特征,进一步提升感知能力,更精准识别障碍物,同时支持多传感器配置,包括鱼眼与针孔等不同模型相机混合输入,推理阶段相机组合更灵活,满足不同方案的硬件配置需求。
02专利《一种泊车 APA 规划控制方法及装置》
在刚需智能泊车产品 MaxParking 中,Nullmax 通过多项专利技术提升泊车抗扰动能力与鲁棒性,降低算力消耗。其中,专利《一种泊车 APA 规划控制方法及装置》通过获取车位类型、角点及障碍物坐标,构建车位坐标系并确定泊车起点、预终点和终点的位姿;基于多路径规划算法生成泊车路径,实现在保证规划精度的同时降低算力需求,并提升对不同泊车场景的适应能力。
学术引领:推动前沿技术演进
在学术研究方面,Nullmax 保持高水平输出,多项成果入选 AAAI、CVPR、ICCV、ECCV、WACV、ICRA、IROS 等全球顶级会议及期刊,彰显了扎实的研究实力。
2025 年,Nullmax 新增 3 项创新研究获顶会及期刊收录,为下一代智驾系统演进提供理论原型与方向指引:
01CurveFormer++:3D Lane Detection by Curve Propagation with Temporal Curve Queries and Attention
02HiP-AD:Hierarchical and Multi-Granularity Planning with Deformable Attention for Autonomous Driving in a Single Decoder
03DiffRefiner:Coarse to Fine Trajectory Planning via Diffusion Refinement with Semantic Interaction for End to End Autonomous Driving
基于坚实的专利积累与研发能力,Nullmax沿着两条路径灵活整合技术“积木”,一方面深耕L2+量产市场,以全栈自研的平台化能力赋能智驾方案,将技术的“稳定性”与“高效能”发挥到极致。另一方面积极布局L4前瞻领域,充分释放底层技术的“灵活性”与“通用性”,拼搭智能便捷的多元出行场景。
未来,Nullmax将继续深化技术积淀,与全球产业伙伴协同创新,共同推动智能驾驶技术的规模化落地与产业进化。
